




歯車の代わりに「ロープ」を使って駆動するロボット犬「CARA」が登場

さまざまなロボットやガジェットを自作するYouTuberのAaed Musa氏が、歯車の代わりに「ロープ」を使って駆動するロボット犬「CARA」を開発しました。CARAを開発する様子や実際に四足歩行のロボット犬が動く姿も、Musa氏のYouTubeチャンネルに投稿された動画で確認できます。
CARA — Aaed Musa
https://www.aaedmusa.com/projects/cara
High Precision Robot Dog Using Rope - YouTube

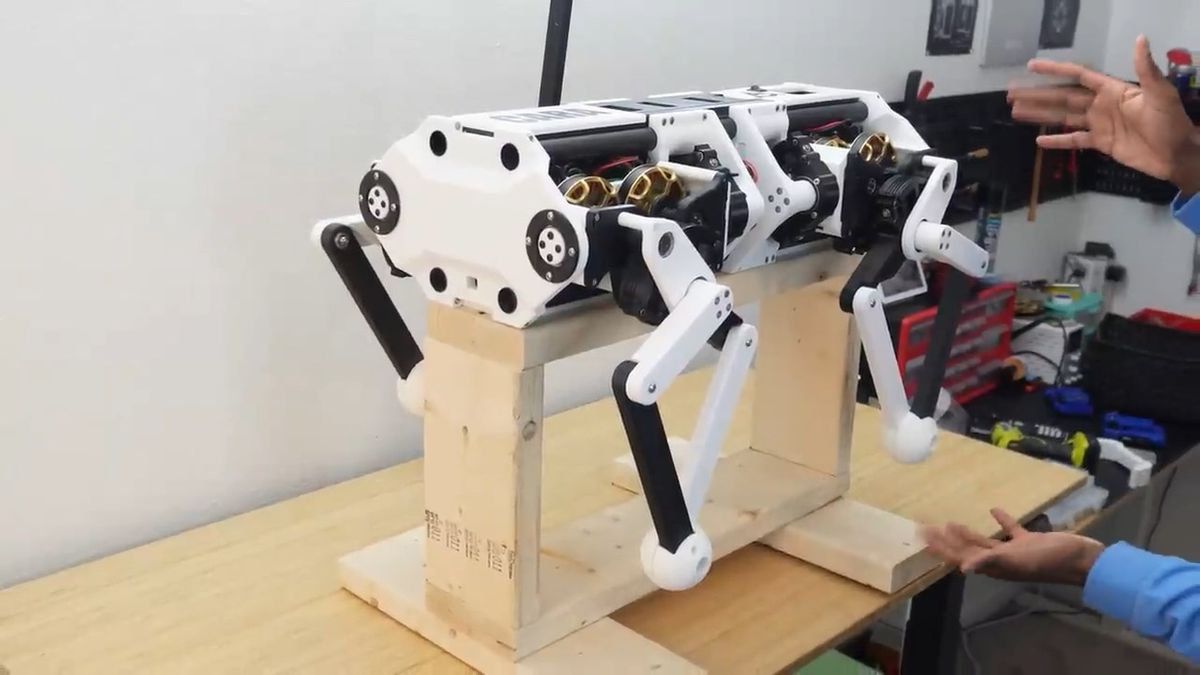
Musa氏の背後にいるのがロボット犬のCARAです。

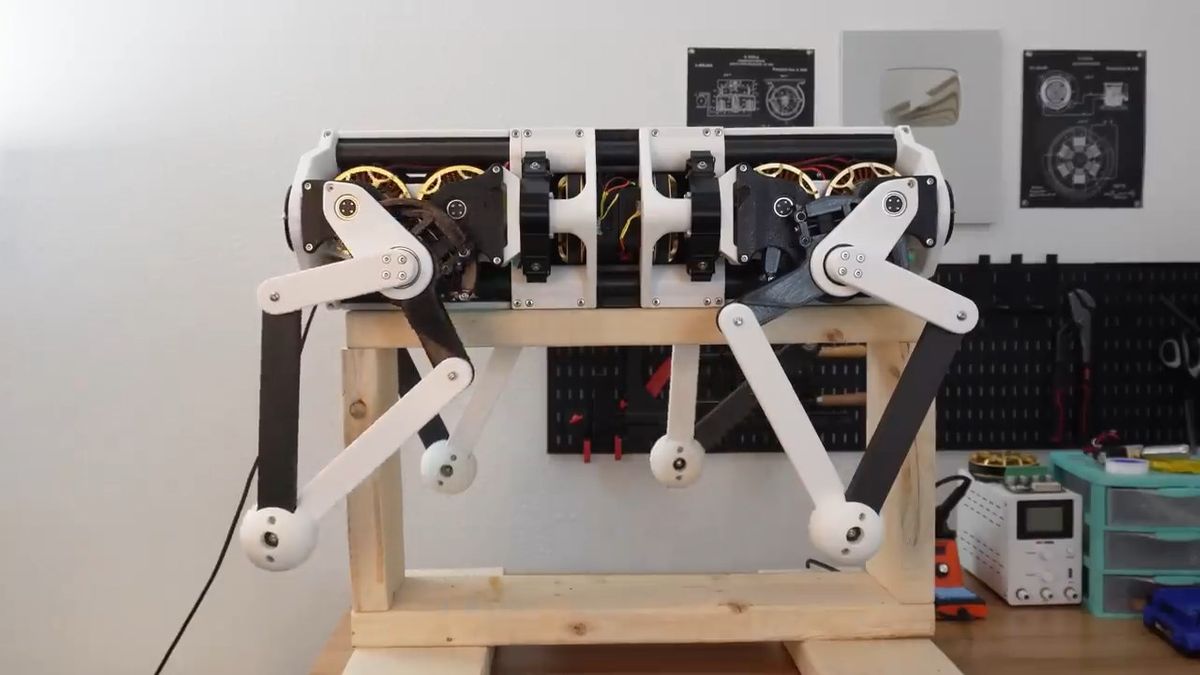
CARAの特徴はなんと言っても、動力伝達に歯車やプーリを使っていないという点。CARAではこれらの部品の代わりに、ロープを用いて動力を伝達しています。

CARAという名称は「Capstans Are Really Awesome」の頭文字を取ったもの。「Capstans(キャプスタン)」とは帆船で使われる垂直回転式のウインチのことです。

約1年前、Musa氏はロープを駆動した減速機である「キャプスタン・ドライブ」の開発に取り組みました。
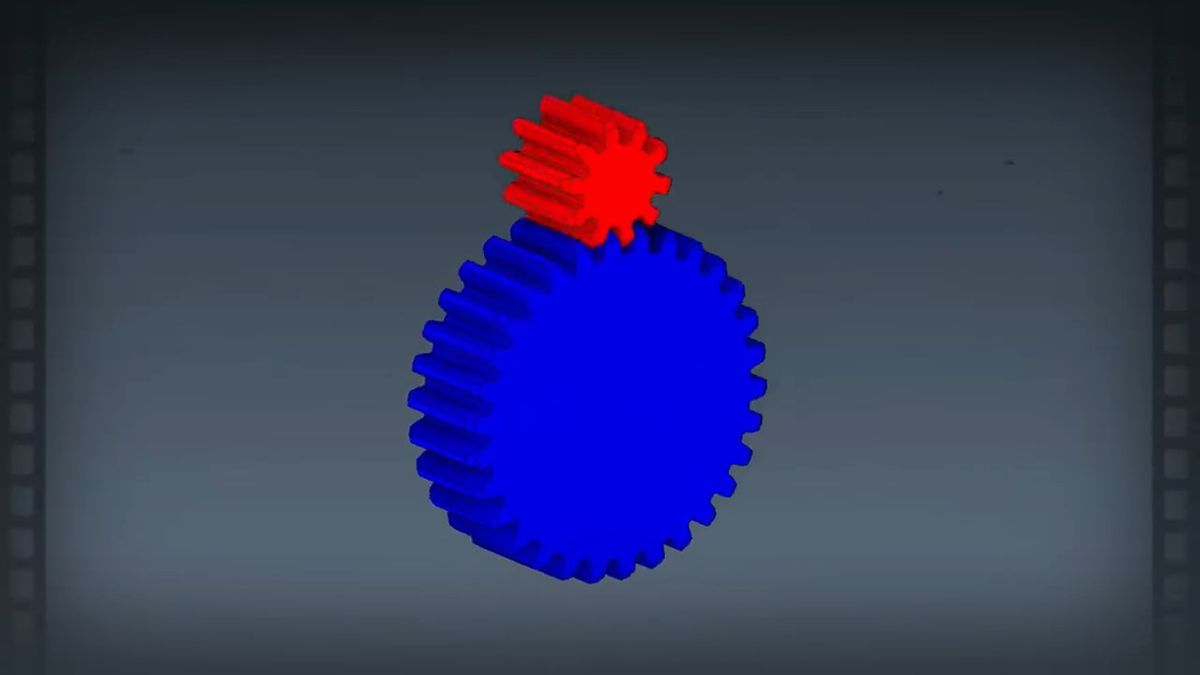
一般的な歯車を用いた減速機はこんな感じ。歯車をかみ合わせて回転速度を減らす代わりにトルクを得ることができます。
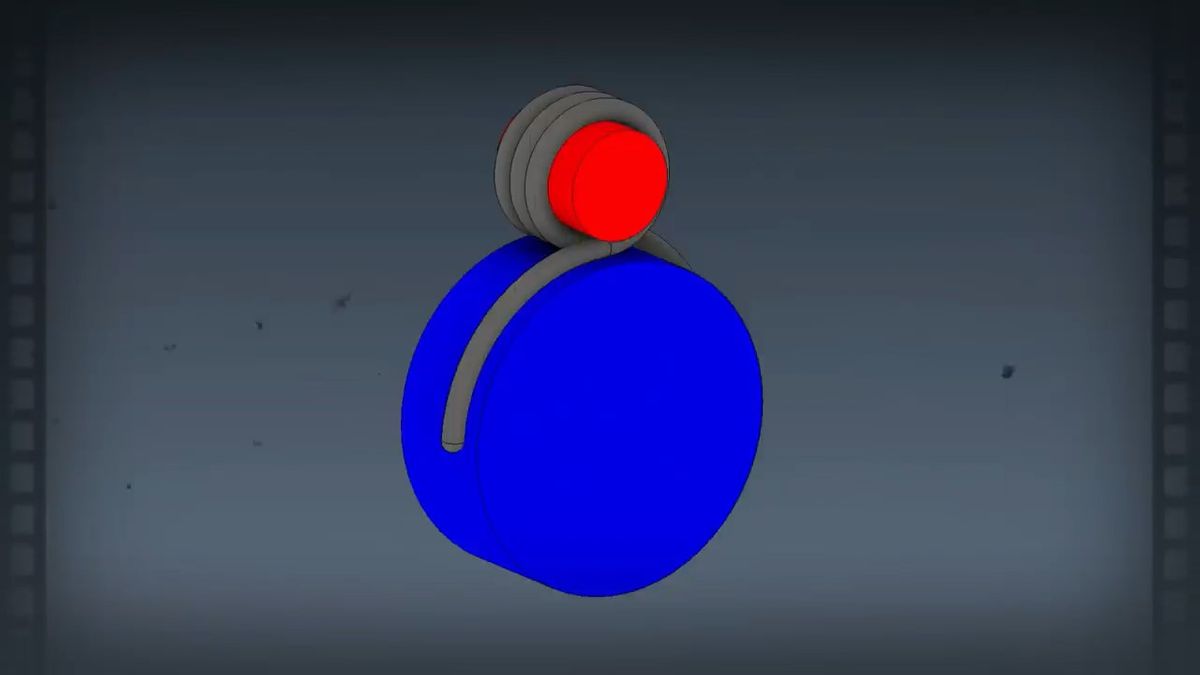
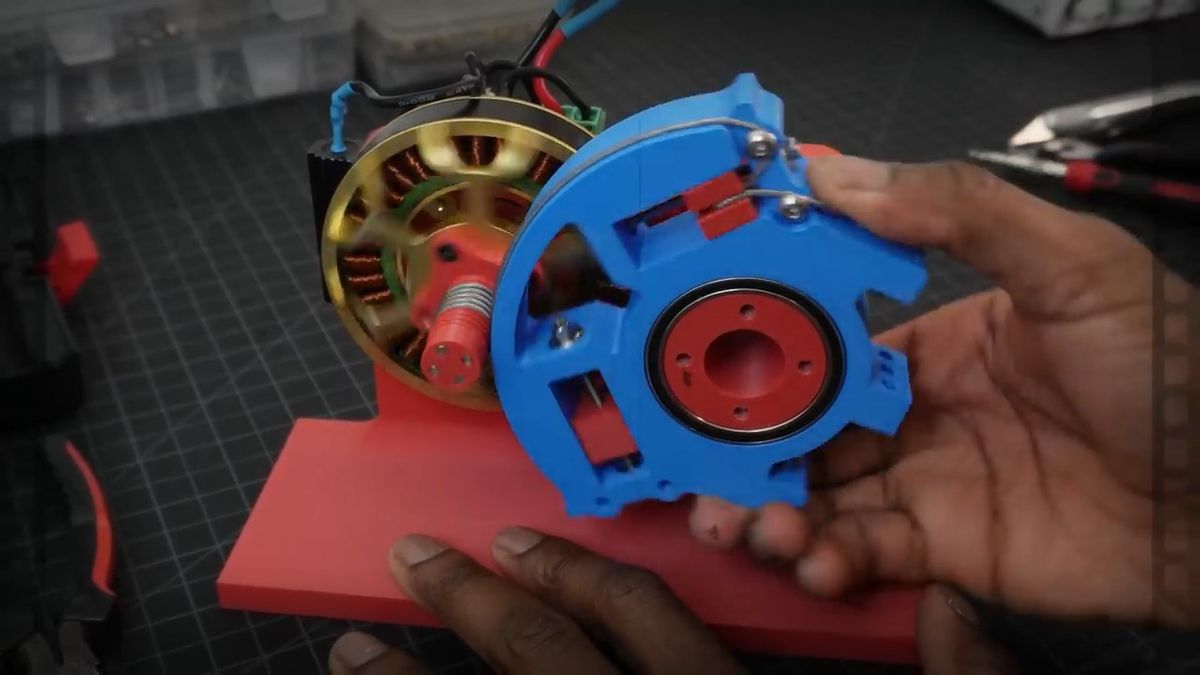
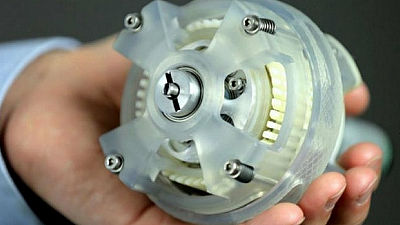
キャプスタン・ドライブは歯車のギアをなくし、ドラム部分だけを接触させて、2つのドラムに巻き付けたロープでトルクを伝達する減速機です。
実際にMusa氏が作ったキャプスタン・ドライブはこんな感じ。
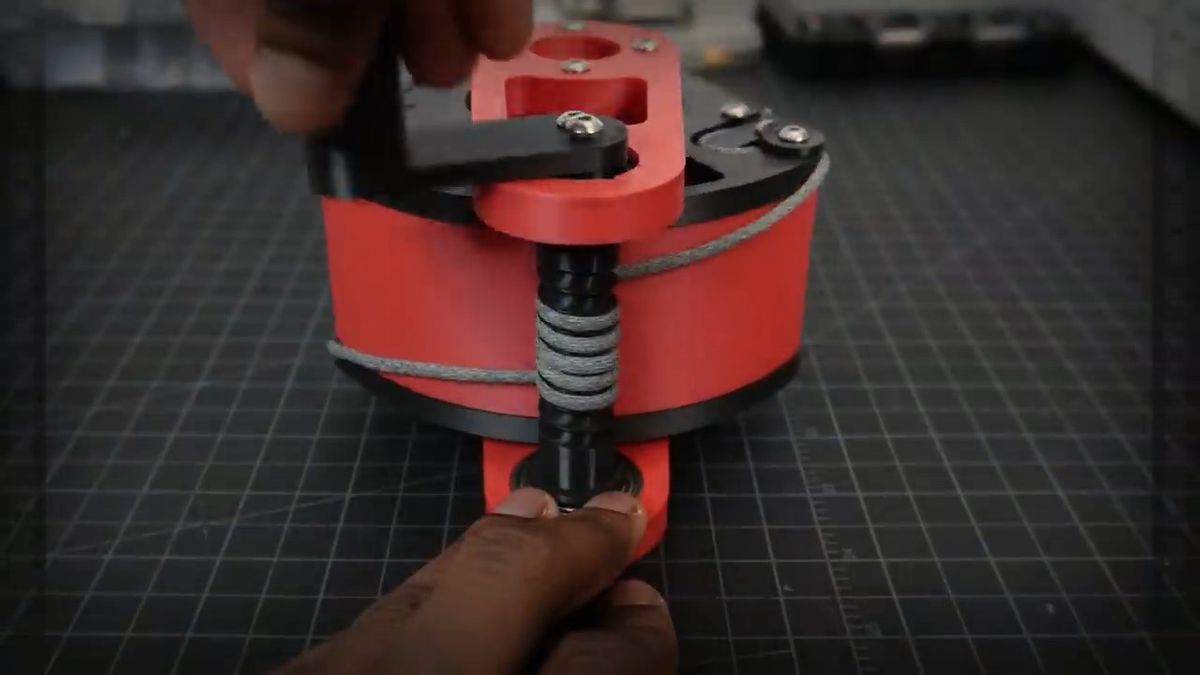
ドラムの周りに巻き付けられているのは、「Dynamica DM20」という特殊なロープです。DM20の特徴は、クリープ率がゼロであり、張力をかけても時間経過と共にロープが伸びないという点。

これにより遊びが実質的にゼロとなり、非常に精度の高い動力伝達が可能になっているというわけです。ノイズの少なさやコストの低さにより、キャプスタン・ドライブはロボット工学にとっていい選択肢になるとMusa氏は主張しています。
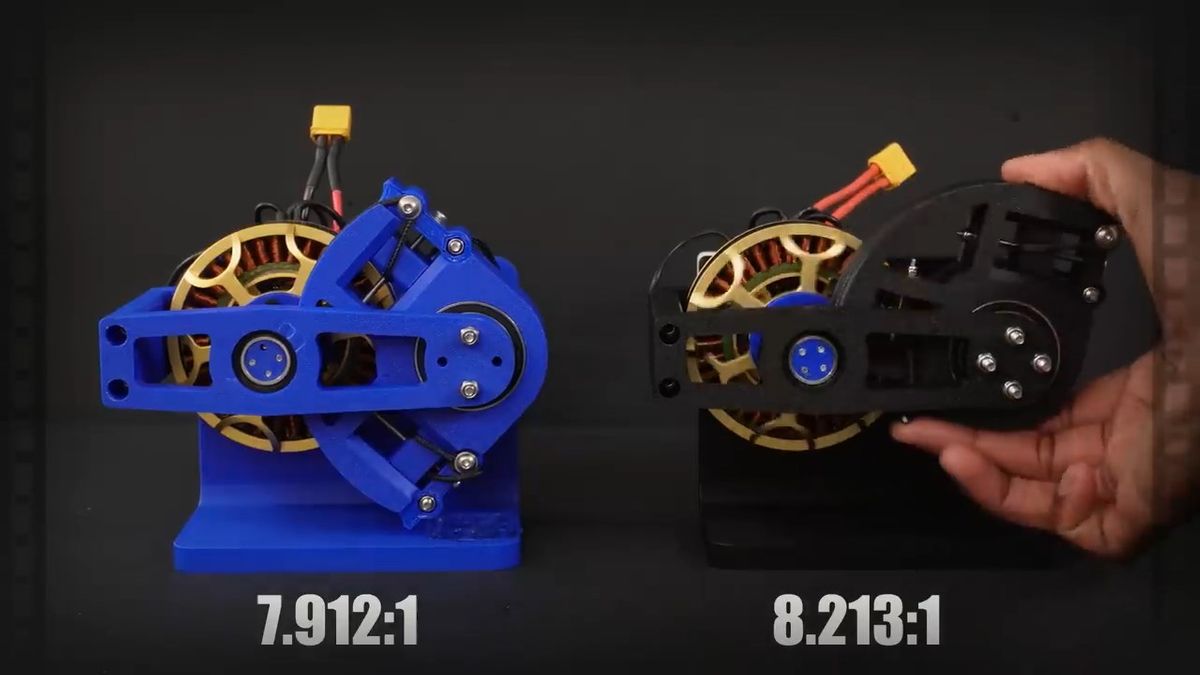
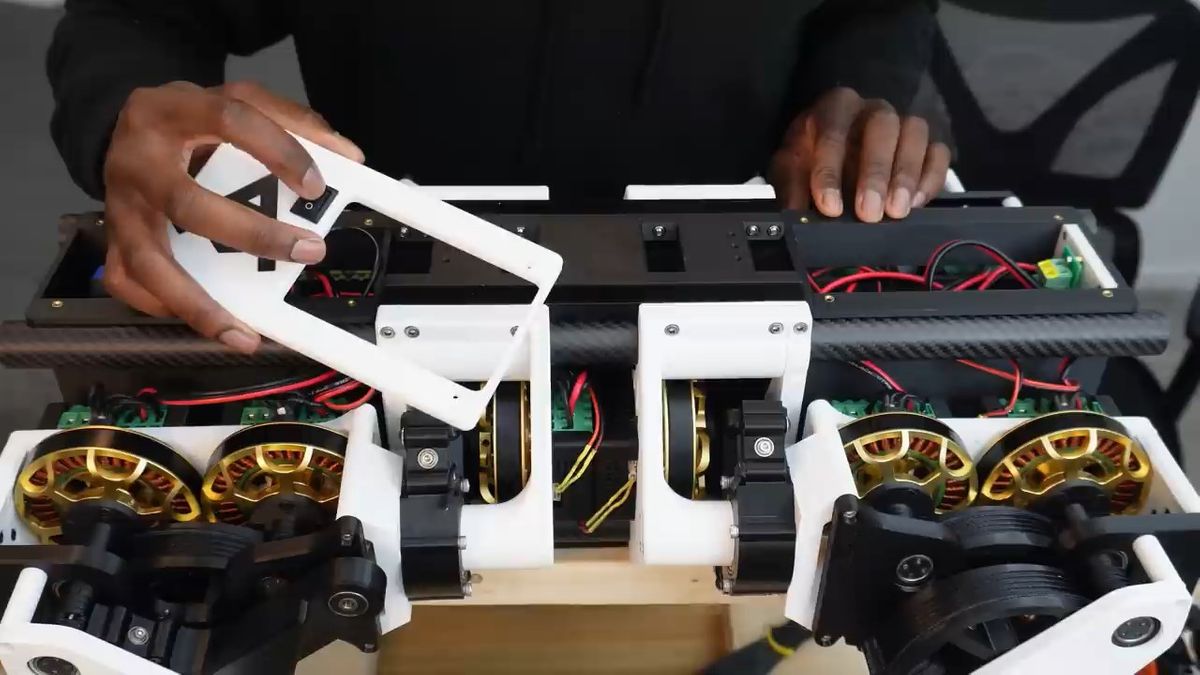
今回Musa氏は、このキャプスタン・ドライブを用いてロボット犬を制作することにしました。まずはドラムの直径に加えてロープの直径も考慮した上で、ギア比が可能な限り8:1に近づくキャプスタン・ドライブを設計。
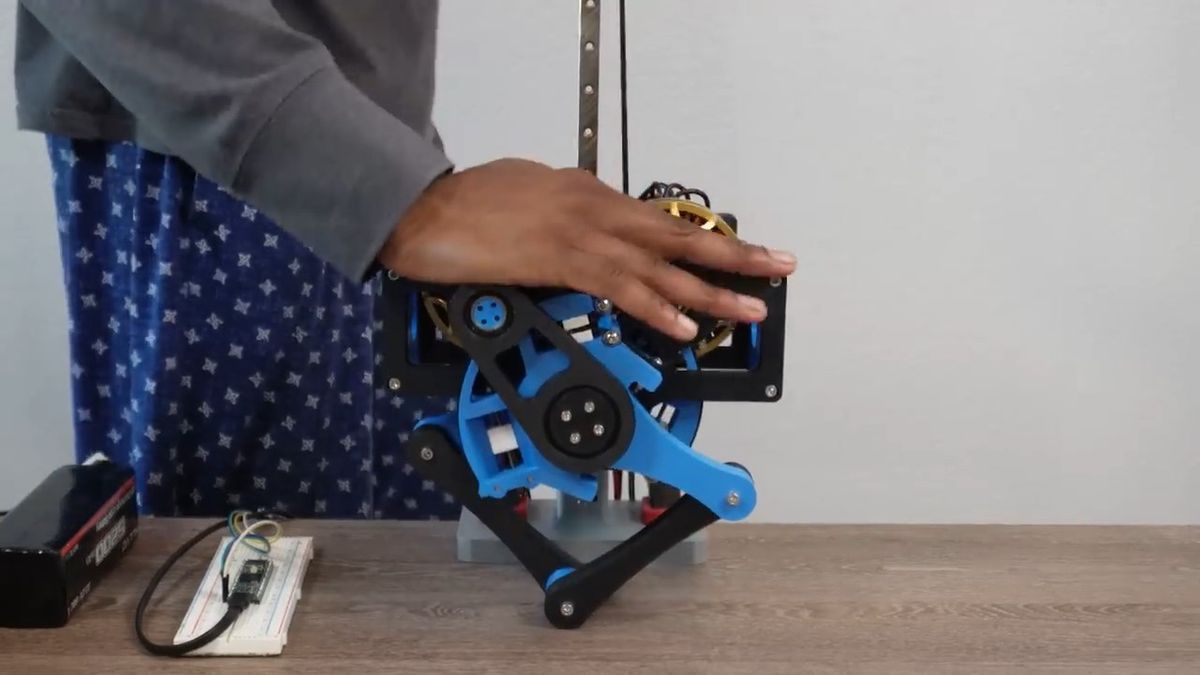
ロボット犬の脚には5本のバーからなる5バー脚設計を採用。
モーターには大型ドローン用のブラシレスモーターであるEagle Power 90 KVを使用しました。ドローン用に作られたモーターではあるものの、このようなパンケーキ型の形状はロボット工学に最適だとのこと。

モーターの制御にはOdrive S1 FOCを採用。これにより、通常のブラシレスモーターが位置・速度・トルク制御を備えたアクチュエーターに変わるそうです。

これでテスト用のロボット脚が完成。
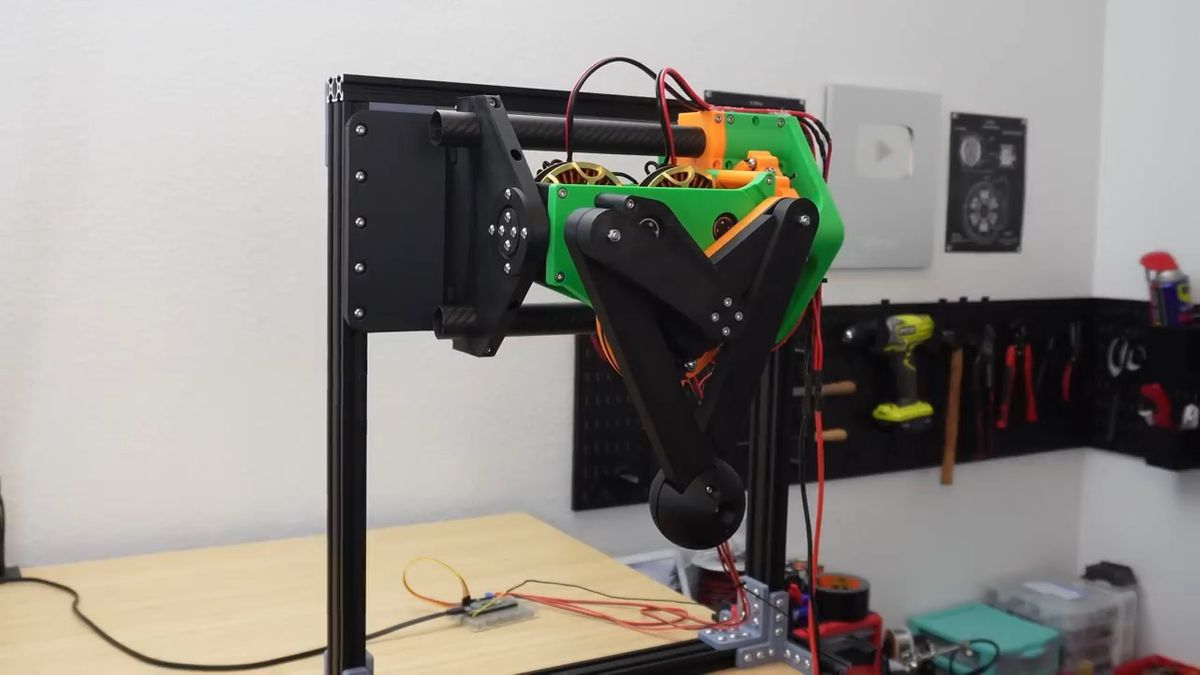
さまざまなコントロールパラメーターを調整したり、最適な脚の位置を割り出したり、細かい脚の動きや速度の調整を行い、制御用のソフトウェアを開発しました。
CARAの頭脳となるのは、PJRC Teensy 4.1マイクロコントローラー。

制御にはRCリモコンと受信機を用います。

CARAのデザインはシンプルかつ組み立てや修理が簡単なものとなっており、補強のための前面プレートには目のように見えるパーツもあります。
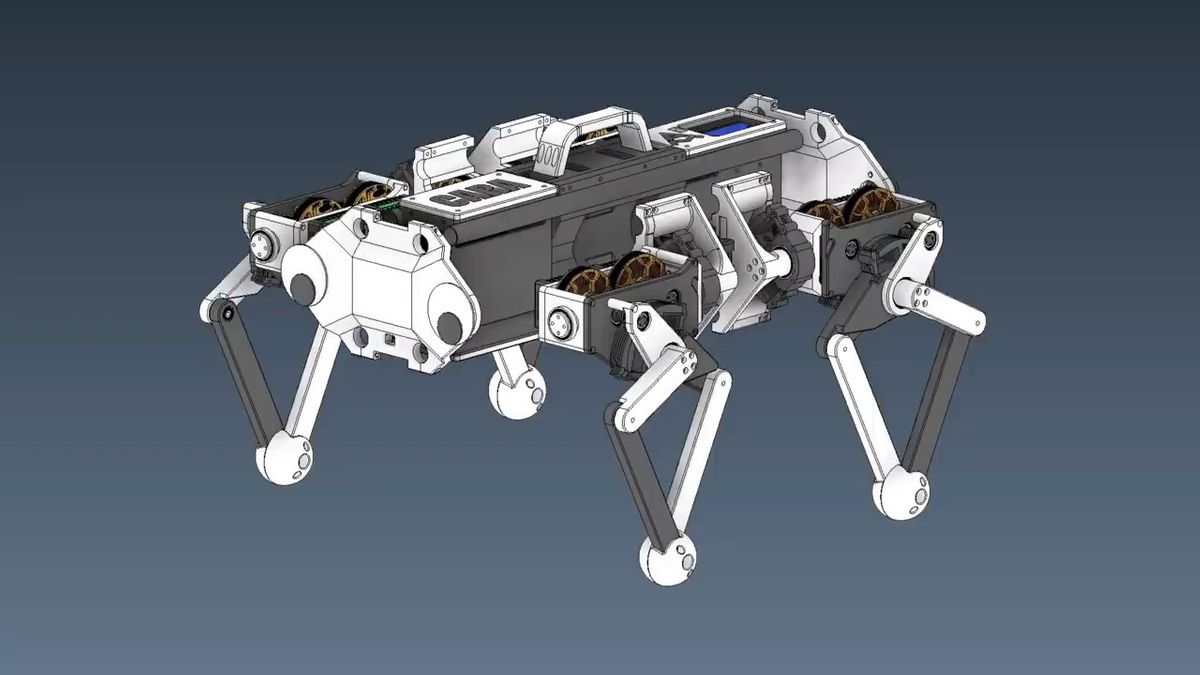
背面のハンドルや脚の材料にはポリウレタン系熱可塑性エラストマー(TPU)が用いられ、残りの部分は高強度のポリカーボネートとポリエチレンテレフタラート(PET)カーボンファイバーで3Dプリントされました。
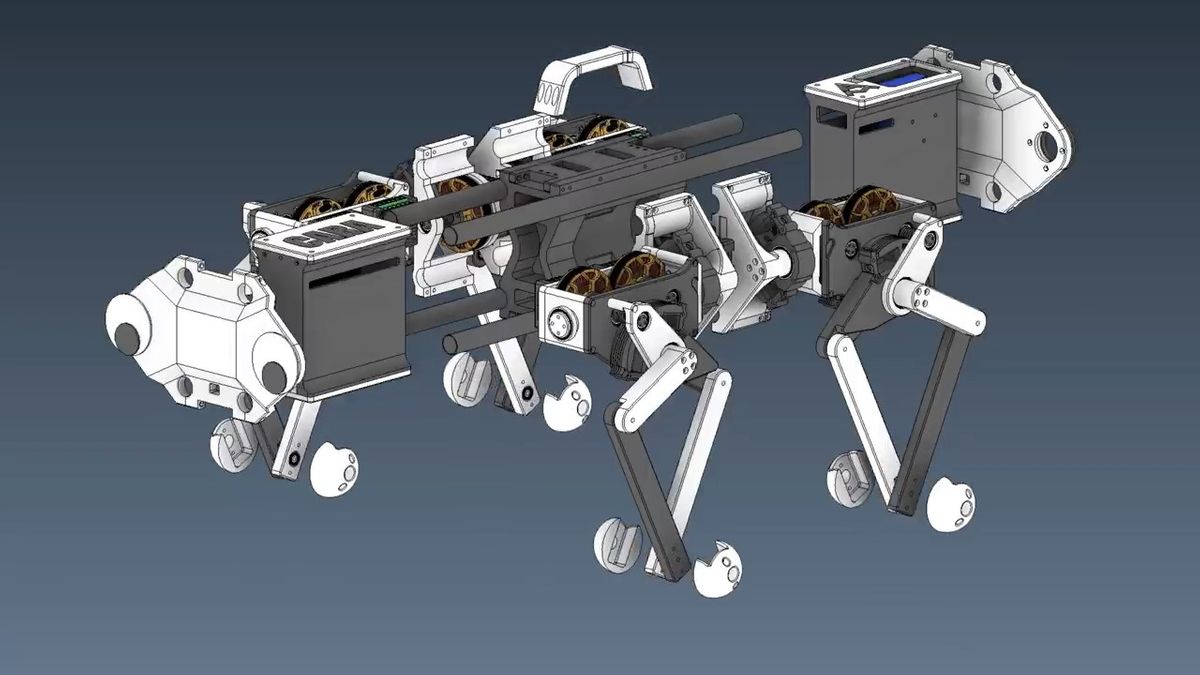
部品が3Dプリントできたら組み立てます。
次第にロボット犬らしい見た目に。

組み立てが完了しました。
最後にCARAのプログラミングを行います。

CARAは四足歩行の動物と同様に、対角に位置する脚が同時に動いて歩きます。
Musa氏は脚の上げ方にもこだわって修正を行いました。

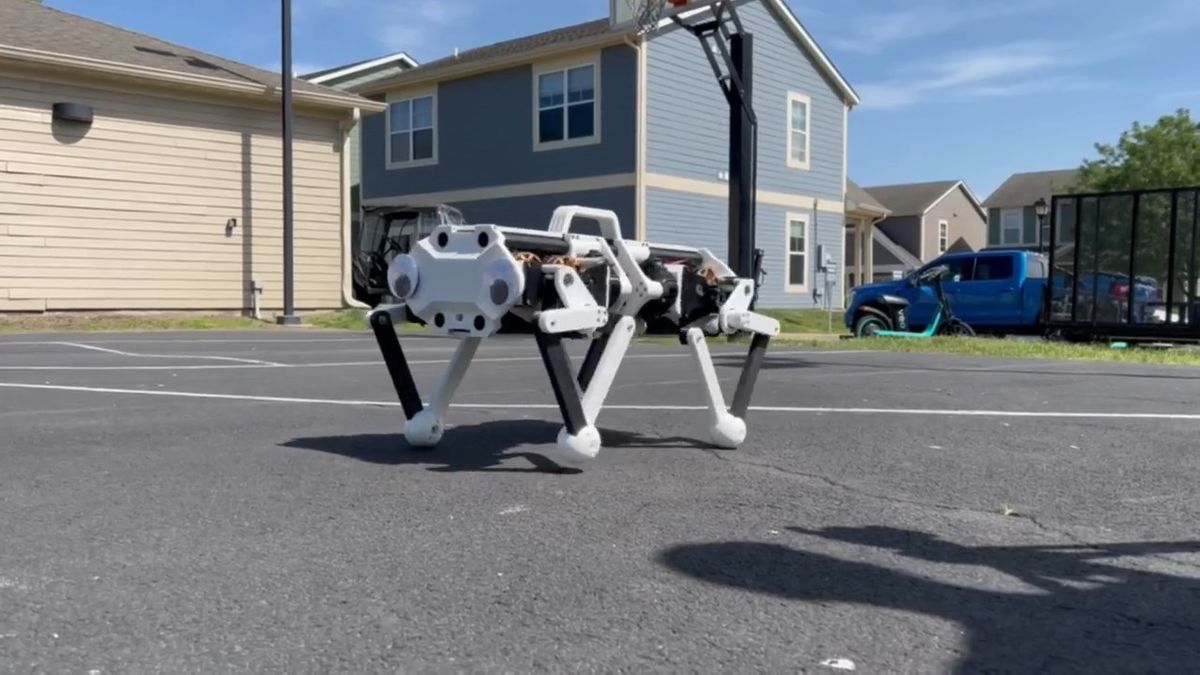
ついに屋外でのテストを開始。
軽快に動いていたCARAでしたが、「バキッ」という音がして固まってしまいました。

脚が折れてしまっていたので、Musa氏は脚の強度を改善しました。また、歩幅を小さくして脚にかかる負担を軽減する修正も施したとのこと。

さらに慣性測定ユニットを搭載し、CARAが回転や傾きを検出してバランスを取れるようにしました。

これには、CARAがまったく新しい動きをできるようにプログラムを修正する必要があったそうで、Musa氏は「これは間違いなく、この開発の中で最も大変だった部分です」と述べています。

しかし、CARAがうまく傾いてくれた時の感動は大きかったようで、「CARAがその場で傾くのを見た時が、このプロジェクトのハイライトでもありました。動きはとても滑らかで、CARAに命が吹き込まれたと思いました」とMusa氏は語りました。

こうしてついにCARAが完成。

前後左右に動いたり、その場で回転したりできます。カニ歩きのように横向きで移動することも可能。

その場でジャンプすることもできます。

前向きに身を乗り出したり、体をぐるっとひねることも可能です。


乗っている机を傾けても、うまくバランスを取って倒れません。

脚で蹴って意地悪してみても倒れませんでした。

Musa氏は今後もCARAのアップデートを行う予定であるほか、設計ガイドを備えたCARAの小型バージョンをオープンソースで公開することも計画しているとのことです。

・関連記事
雪原や森を縦横無尽に走り回りジャンプしながら炎を噴出できる火炎放射器搭載イヌ型ロボット「Thermonator」が登場 - GIGAZINE
アメリカ軍が試験運用中のドローンを迎撃し撃墜するロボット犬を公開 - GIGAZINE
掃除機搭載型ロボット犬がビーチを掃除している - GIGAZINE
物を拾い上げたり置いたりできるプログラム可能でオープンソースのロボットアーム「SO-101」をHugging Faceが発表 - GIGAZINE
観測用レーダー搭載ドローンを自作した猛者が登場、上空を移動して広大な範囲を観測可能 - GIGAZINE
3Dプリンターで垂直離着陸可能&1回の充電で3時間も飛行できるドローンを自作した猛者が登場 - GIGAZINE
Google DeepMindから「自己改善型AI」が登場、あらゆる場面でのロボットアームの使い方を勝手に身につけることが可能 - GIGAZINE
・関連コンテンツ





in ハードウェア, サイエンス, 動画, Posted by log1h_ik
You can read the machine translated English article Introducing CARA, a robot dog that uses ….